2015年6月18日
車載PCを作るよ!!!! まずは目から?
おひさしぶりです、やっと金のエンゼラーになった鈴木です。
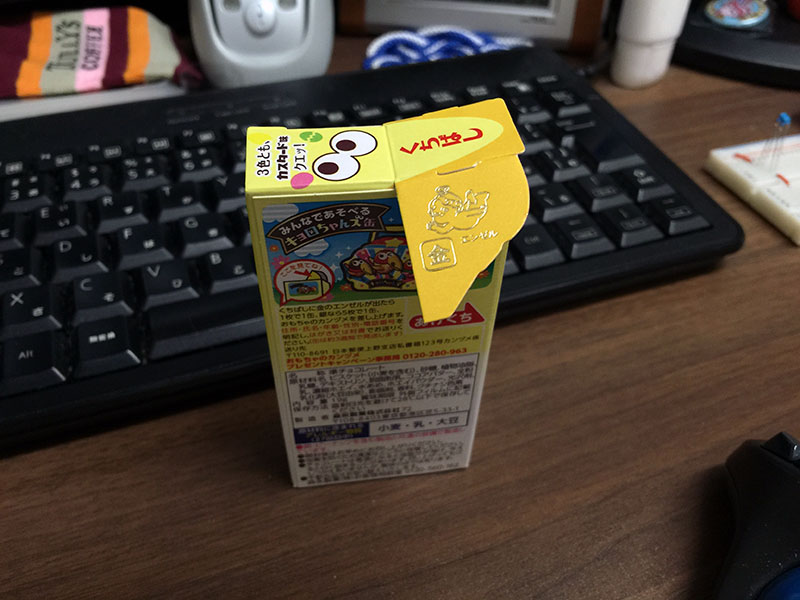 少しばかり前にエンゼル狩りに行った時のことです、
少しばかり前にエンゼル狩りに行った時のことです、厳選した2箱を
最近勝率が悪かったので、「どうかな~」と1箱目の嘴を開けました。
(゚д゚)!
(つд⊂)
(゚д゚)! <△◇※mりおあm….
(つд⊂)
(゚д゚)! <△◇※mりおあm….
うひょ~金だ~~ヽ(´ー`)ノ
自分で金を当てたのは初めてなので、もの凄く嬉しかったです!
自分で金を当てたのは初めてなので、もの凄く嬉しかったです!
前回の「車載PCを作るよ!! ぱわわっぷ!」から2年近く経ってしまいました。
製作が思うように進まなかったり、ボツになったりと、モチベーションも奈落の底に落ちていました。
今回の記事は、そんな中で作られた、目のお話です。

目? なんのこっちゃ?
と、言われそうですが、
パソコンで目に相当するのは、やっぱりカメラだと思います。
ん? カメラ付けるだけじゃないの?
と、またまた言われそうですが、
今回作るのは、カメラを複数台使って車両前方の障害物の位置を検出する仕組みです。
自動運転には欠かさない仕組みですね。
初めに、カメラの映像から人や車を探して四角く囲むプログラムを書いてみたのですが、
なんだかCPUに負荷は掛かるし、精度も悪いので使い物になりませんでした。

 次に、カメラ2台を使って視差による障害物の検出をする方法(人間の目の仕組みと同じ)に切り替えました。
次に、カメラ2台を使って視差による障害物の検出をする方法(人間の目の仕組みと同じ)に切り替えました。識別できなくても、人でも、車でも、落下物でも何でも前方にあれば危険なので…
さっそくプログラムを書いて試してみます。
4つあるウィンドウの左下のウィンドウが前方に在る物までの距離を表示しているものです。
白く明るいほど近くに在るという表示にしてみました。
動作も軽く、リアルタイムに計算できているようです。
問題は、2台のカメラのシャッターを同期させるにはどうするかです。
僅かな視差から結果を得るので、タイミングがずれると計算結果もずれます。
カメラの調整をしたらもうちょっと良い結果が得られそうです。
次は、お口のお話かも…!?
次回「車載PCを作るよ!!!次は口…やっと音が…」へつづく…
 0
0 この記事を評価
アーカイブ
ゴトウスバル本社
2025年9月 (1)
2025年8月 (2)
2025年5月 (42)
2025年4月 (25)
2025年3月 (36)
2025年2月 (54)
2025年1月 (37)
2024年12月 (35)
2024年11月 (33)
2024年10月 (64)
2024年9月 (34)
2024年8月 (21)
2024年7月 (35)
2024年6月 (7)
2024年5月 (42)
2024年4月 (56)
2024年3月 (46)
2024年2月 (39)
2024年1月 (29)
2023年12月 (20)
2023年11月 (7)
2023年10月 (20)
2023年9月 (19)
2023年8月 (13)
2023年7月 (15)
2023年6月 (7)
2023年5月 (33)
2023年4月 (26)
2023年3月 (23)
2023年2月 (19)
2023年1月 (25)
2022年12月 (34)
2022年11月 (43)
2022年10月 (36)
2022年9月 (11)
2022年8月 (5)
2022年7月 (11)
2022年6月 (7)
2022年5月 (1)
2022年4月 (8)
2022年3月 (7)
2022年2月 (16)
2022年1月 (17)
2021年12月 (5)
2021年8月 (3)
2021年7月 (2)
2021年6月 (2)
2020年12月 (1)
2020年11月 (4)
2020年10月 (2)
2020年9月 (2)
2020年8月 (9)
2020年2月 (9)
2020年1月 (5)
2019年12月 (1)
2019年8月 (1)
2019年7月 (6)
2019年6月 (5)
2019年5月 (9)
2019年4月 (17)
2019年3月 (7)
2019年2月 (5)
2019年1月 (8)
2018年12月 (9)
2018年11月 (9)
2018年10月 (8)
2018年9月 (2)
2018年8月 (4)
2018年7月 (6)
2018年6月 (3)
2018年5月 (2)
2018年4月 (4)
2018年3月 (3)
2018年2月 (3)
2018年1月 (4)
2017年12月 (4)
2017年11月 (5)
2017年10月 (5)
2017年9月 (6)
2017年8月 (9)
2017年7月 (11)
2017年6月 (15)
2017年5月 (7)
2017年4月 (10)
2017年3月 (12)
2017年2月 (13)
2017年1月 (19)
2016年12月 (25)
2016年11月 (24)
2016年10月 (14)
2016年9月 (21)
2016年8月 (17)
2016年7月 (21)
2016年6月 (19)
2016年5月 (14)
2016年4月 (18)
2016年3月 (22)
2016年2月 (28)
2016年1月 (24)
2015年12月 (19)
2015年11月 (26)
2015年10月 (29)
2015年9月 (32)
2015年8月 (29)
2015年7月 (53)
2015年6月 (58)
2015年1月 (1)
2014年7月 (2)
2013年8月 (1)
2013年6月 (5)
2013年5月 (6)
2012年12月 (1)
2012年10月 (2)
2012年9月 (1)
2012年7月 (1)
2012年6月 (1)
2012年5月 (1)
2012年4月 (6)
2012年3月 (8)
2012年2月 (7)
2012年1月 (2)
2011年12月 (5)
2011年11月 (12)
2011年10月 (30)
2011年9月 (16)